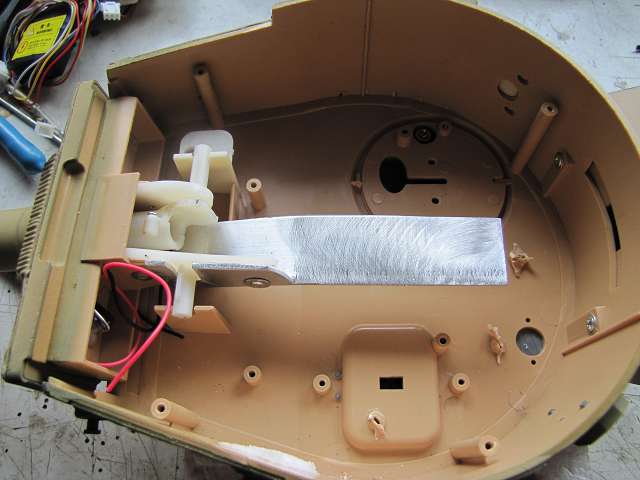
Today, the tiger should at least be structurally finished .
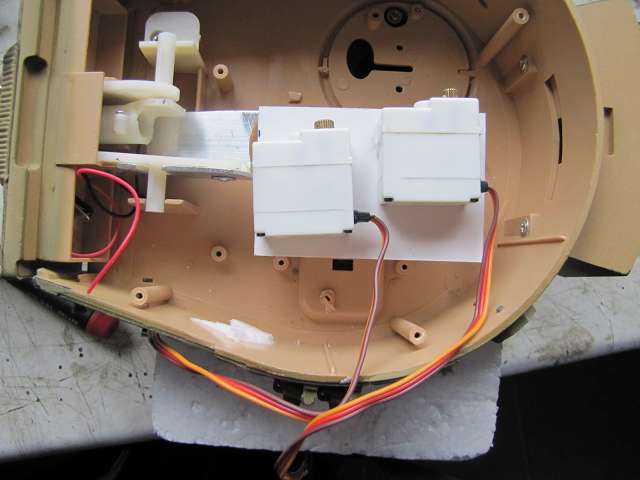
First off even attach the servo for the recoil .

Then the second servo for elevation each . I'm using since only servos with metal gears , as these sometimes bear a blow and not go the same gear broken.

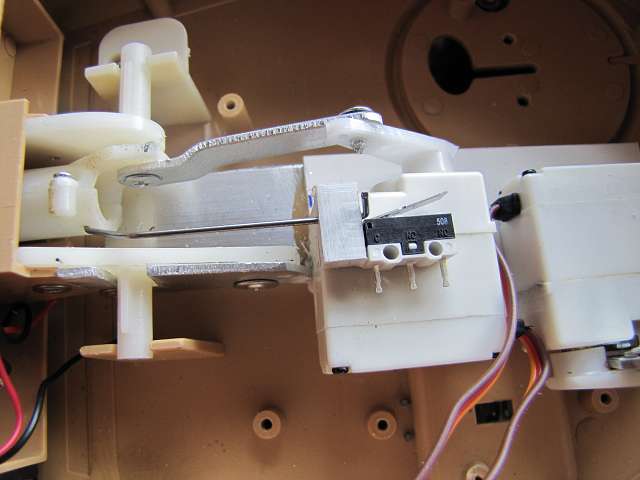
To drive the switch to the speed camera I've thought of something new . Since the gun is not usually play out , it was difficult to place a button so that it always triggers . Well -built probe enable the large tolerances were not always successful . Therefore I now have a push rod that is installed , just before the switch. Thus , the tube can move as it wants and the button is still addressed and the flash fires .

Now, he stands there and tomorrow I will deal with programming and setting of the sound module and a few remaining tasks . He sollter then can go to its new owner this week .